Frequently Asked Questions¶
Some FAQ answers may use C++ code snippets; however, the answers apply to the python bindings SDK too.
For a list of community driven FAQs and answers, please visit: https://support.trueface.ai/support/discussions/forums/48000347123
How many threads does the SDK use for inference?
The SDK inference engines can use up to 8 threads each, but this is dependant on the number of cores your system has.
The batchIdentifyTopCandidate function is capable of using all cores on your machine, depending on the number of probe faceprints provided.
How can I reduce the number of threads used by the SDK?
If you need to reduce the number of threads utilized by the SDK, this can be achieved using the OpenMP environment variable OMP_NUM_THREADS.
The SDK has been optimized to reduce latency. If you instead want to increase throughput, then limit the number of threads and instead run inference using multiple
instances of the SDK in parallel.
The following graph shows the impact of threads on inference speed.

Is the SDK threadsafe?
In CPU only mode, the SDK is threadsafe. However, note that the setImage function is stateful and therefore necessary precautions should be taken. We also don’t advise running inference functions (face detection, face recognition, object detection, etc) in parallel using the same SDK instance as it will be slower than running inference in serial (therefore use a worker queue architecture, more on this below).
In GPU mode, the SDK is not threadsafe. You should also avoid creating multiple SDK instances for the same GPU index. However, you can create an instance of the SDK for each GPU your machine has (and assign the GPU index accordingly).
What architecture should I use when I have multiple camera streams producing lots of data?
For simple use cases, you can connect to a camera stream and do all of the processing directly onboard a single devices.
The following approaches are ideal for situations where you have tons of data to process.
The first approach to consider is a publisher/subscriber architecture.
Each camera producing data should push the data into a shared queue, then a worker or pool of workers can consume the data in the queue and perform the necessary operations on the data using the SDK. For a highly scalable design, split up all the components into microservices which can be distributed across many machines (with many GPUs) and use a Message Queue system such as RabbitMQ to facilitate communication and schedule tasks for each of the microservices. For maximum performance, be sure to use the GPU batch inference functions (see batch_fr_cuda.cpp sample app) and use images in GPU RAM (see face_detect_image_in_vram.cpp sample app).
Another approach is to process the camera stream data directly at the edge using embedded devices then either run identify at the edge too, or if dealing with massive collections, send the resulting Faceprints to a server / cluster of serves to run the identify calls.
Refer to the “1 to N Identification” tab (on the left) for more information on this approach.
Finally, you can manage a cluster of Trueface Visionbox instances using kubernetes or even run the instances on auto scaling cloud servers and post images directly to those for processing.
These are just a few of the popular architectures you can follow, but there are many other correct approaches.
Some things to note. Each SDK instance can use up to 8 threads for inference on CPU. Being mindful of this, only create as many CPU workers (each with their own SDK instance) as your CPU can support (on most 4 core CPUs you should only have one instance of the CPU SDK running), otherwise performance will be negatively impacted. Refer to “How can I reduce the number of threads used by the SDK?” question above for more details.
What is the difference between the static library and the dynamic library?
The static library libtf.a is the CPU only library, while the dynamic library libtf.so offers GPU and CPU support. You will need to have CUDA 10.1 installed in order to use the dynamic library.
What hardware does the GPU library support? The GPU enabled SDK supports NVIDIA GPUs with GPU Compute Capability 6.0+, and currently supports CUDA 10.1. Learn more here
Why is my license key not working with the GPU library? The GPU library requires a different token which is generally tied to the GPU ID. Please speak with a sales representative to receive a GPU token.
Why does the first call to an inference function take much longer than the subsequent calls? Our modules use lazy initialization meaning the machine learning models are only loaded into memory when the function is first called instead of on SDK initialization. This ensure minimal memory overhead from unused modules. When running speed benchmarks, be sure to discard the first inference time.
How do I use the python bindings for the SDK?
Simply download the python bindings library and place it in the same directory as your python script.
The CPU python bindings library already includes CPU SDK (libtf.a) so you will not need to download it as well.
If using the GPU python bindings library, then you will require both the python bindings library as well as libtf.so (both are packaged in the download zip).
Ensure that libtf.so is in your LD_LIBRARY_PATH. You can confirm this by running ldd on the bindings library and ensuring that all dependencies are met.
All you need to do from there is add import tfsdk in your python script and you are ready to go.
How do I choose a similarity threshold for face recognition? Navigate to performance.trueface.ai and use the ROC curves to select a threshold based on your use case. The LITE model in the SDK corresponds to “Model-lite” while the FULL model corresponds to “Model-TFV4”. Refer to this blog post for advice on reading ROC curves.
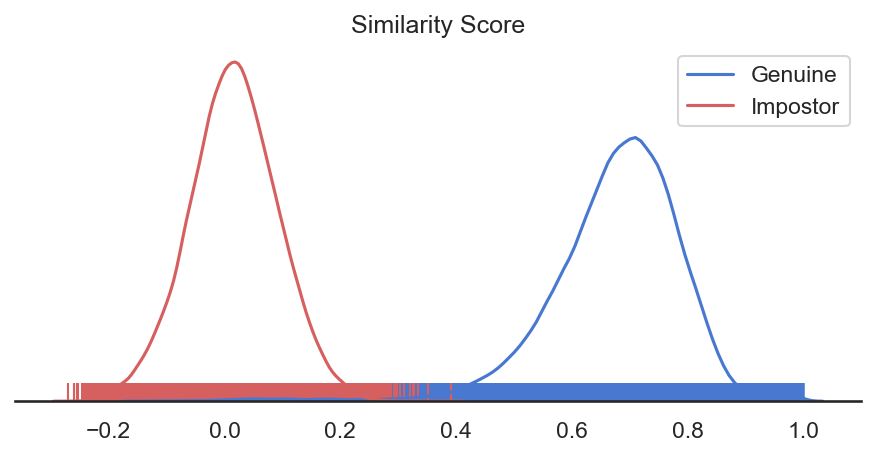
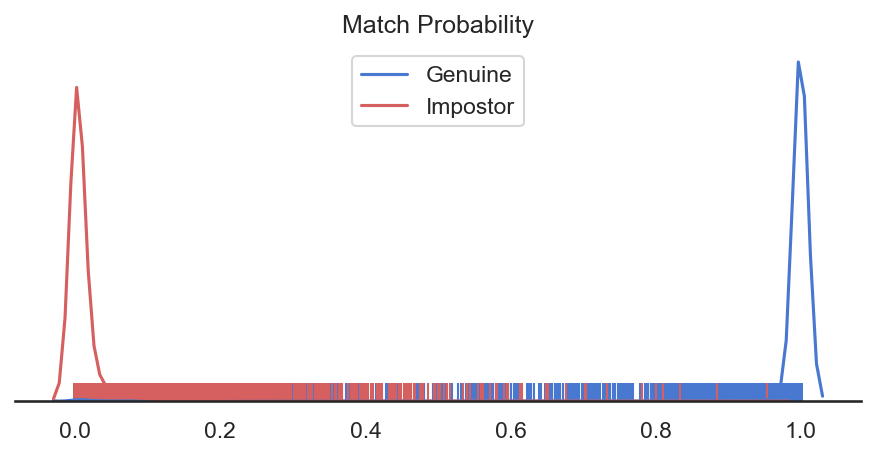
What is the difference between similarity score and match probability? The similarity score refers to the similarity between two feature vectors. The similarity score values can range from -1 to 1. The match probability describes the probability that the two feature vectors belong to the same identity. The match probability can range from 0 to 1.
A regression model is used to transform the similarity score to match probability:
There are many face detection and recognition functions. Which should I use?
This depends on the use case, but a few of the most popular pipelines will be outlined below.
You start by calling setImage. You can either pass this function a path to an image on disk or an image buffer. Next, you have a few options:
1) You can straight away call getLargestFaceFeatureVector which will return the Faceprint of the largest face in the image.
This is perfect for when you only care about the largest face, for example when enrolling a face into a collection.
Be sure to check the ErrorCode from this function call as an image with no face will return ErrorCode::NO_FACE_IN_FRAME.
2) Call detectLargestFace which will return the FaceBoxAndLandmarks of the largest face in the frame. The FaceBoxAndLandmarks can then be passed to
getFaceFeatureVector to generate the face feature vector. This flow is useful for when you require the bounding box coordinates,
such as for drawing a bounding box around the face.
3) Call detectFaces which will return a list of FaceBoxAndLandmarks representing all the faces found in the frame. These faces can then be individually passed to
getFaceFeatureVector to generate the feature vectors, or you can call getFaceFeatureVectors on the list to batch generate the feature vectors. This flow is ideal for
situations where you want to run identification on every face in the image.
Regardless of which of these pipelines you use, the Faceprint can then be passed to one of the 1 to N identification functions such as identifyTopCandidate
How do createDatabaseConnection and createLoadCollection work?
createDatabaseConnection is used to establish a database connection.
This must always be called initially before loading Faceprints from a collection or enrolling Faceprints into a new collection,
unless the Trueface::DatabaseManagementSystem::NONE options is being used, in which case it doesn’t need to be called and you can go straight to createLoadCollection.
Next, the user must call createLoadCollection and provide a collection name.
If a collection with the specified name already exists in the database which we have connected to, then all the Faceprints in that collection will be loaded from the database collection into memory (RAM).
If no collection exists with the specified name, then a new collection is created. From here, the user can call enrollTemplate to save Faceprints to both the database collection and in-memory (RAM) collection.
If using the Trueface::DatabaseManagementSystem::NONE, a new collection will always be created on a call to this function, and the previous loaded collection - if this is not the first time calling this function - will be deleted (since it is only stored in RAM).
From here, the 1 to N identification functions such as identifyTopCandidate can be used to search through the collection for an identity.
Why are no faces being detected in my large images?
If the faces in your images are very large, then the face detector may not be able to detect the face using the default smallestFaceHeight parameter.
The face detector has a detection scale range of about 5 octaves. Ex. 40 pixels yields the detection scale range of ~40 pixels to 1280 (=40x2^5) pixels.
If you are dealing with very large images, or with dynamic input images, it is best to set the smallestFaceHeight parameter to -1.
This will dynamically adjusts the face detection scale range from image-height/32 to image-height to ensure that large faces are detected in high resolution images.
How can I speed up face detection running on CPU?
You can speed up face detection by setting the smallestFaceHeight parameter appropriately.
Increasing the smallestFaceHeight will result in faster inference times, so try to set the smallestFaceHeight as high as possible for your use case if speed is critical requirement.
What does the frVectorCompression flag do? When should I use it?
The frVectorCompression flag is used to enable optimizations in the SDK which compresses the feature vector and improve the match speed for
both 1 to 1 comparisons and 1 to N identification. This flag supports both the LITE and FULL feature vectors.
The flag should be enabled when dealing with massive collections or when matching is very time critical. Additionally, it should be used in environments with limited memory or disk space as it will reduce the feature vector memory footprint.
The following images compare the match speed with and without the optimization enabled:

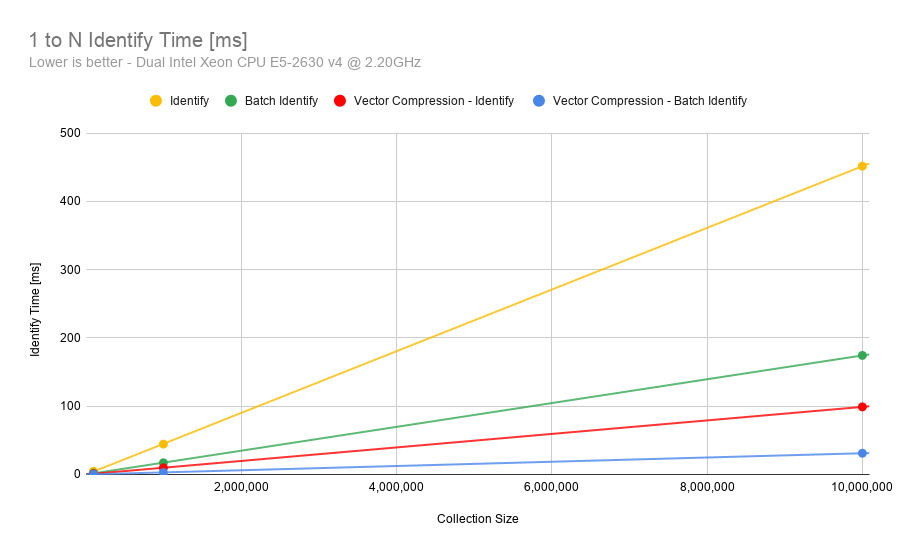
The trade off to using this flags is that it will cause a very slight loss of accuracy. However, the method has been optimized to ensure this loss is extremely minimal.